

Under the framework of:

Sponsors:





Summary of achievements
Project 1 within the BABEN programme aims to research new technological solutions for the assessment and training of postural control aimed at the early detection of the risk of falls and fragility in elderly people, and the training or exercise of balance to prevent the risks of falling. Technological solutions that facilitate the maintenance and recovery of the functional capacity (balance, in particular) of pre-fragile and fragile elderly people.
The final objectives of this project are, on the one hand, the conception and manufacture of a new device for the evaluation of postural control and its technical validation with "gold standard" systems in a biomechanics laboratory (this validation will be carried out through project 2 of the BABEN integrated programme).
Starting from a basic version or prototype of the EQUIMETRIX system, TECNALIA has achieved the design and manufacture of an evolved version (see Figure 1) that it integrates:
- A wearable sensor for capturing the movement of the trunk, which is used in combination with a visual reference pattern placed on the ground.
- A platform for measuring the distribution of plantar pressure. A platform with a large size (1x1m) that allows to study the equilibrium during a step response.
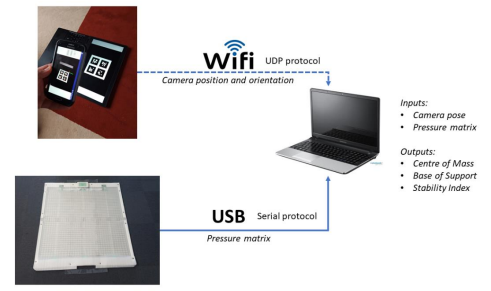
- A processing unit for the estimation of the relative displacement between the CDM and the BDS and the calculation of the "Stability Index" in real time.
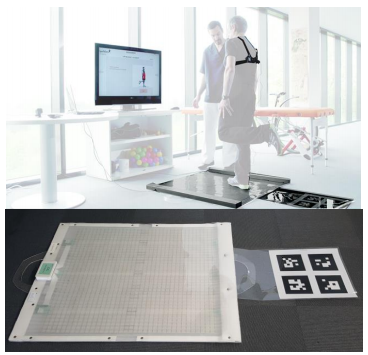
Figure 1 - EQUIMETRIX prototype developed
This version of the EQUIMETRIX system incorporates the following results and improvements:
- Integration in the system of the baropodometric platform of own manufacture and of greater dimensions to the one previously used. Flexible platform, of reduced weight, easy integration and reduced manufacturing cost compared to the use of a commercial platform.
- Obtaining a more reliable value for the stability index thanks to the use of ArUco markers in conjunction with the vision sensor, which facilitates the identification of the position of the person carrying the sensor in a faster and more accurate way.
Another achievement to date has been the adaptation of the prototype and the acquisition software, so that it can be used by LABIOMEP in project 2, with the aim of technically validating the EQUIMETRIX solution developed by comparing it with "gold standard" equipment available in its biomechanics laboratory. TECNALIA and LABIOMEP have jointly defined the protocol of tests and comparisons to be carried out in this analysis. And on this starting point TECNALIA has adapted the software to facilitate data acquisition and prepared and sent a prototype of EQUIMETRIX to LABIOMEP. At the time of writing of this report, a series of measurements and comparisons have already been carried out. As next steps, after the completion of the comparative study being carried out by LABIOEMP within project 2, the analysis of the results of this comparative study is still pending in order to identify the necessary improvements to be implemented in the EQUIMETRIX prototype.
The following section details the results obtained to date.
2. Detail of results achieved in relation to each of the following
the proposed objectives and milestones
The following table summarizes the objectives and associated milestones proposed in the project and their state or degree of achievement at the date of completion of this report:
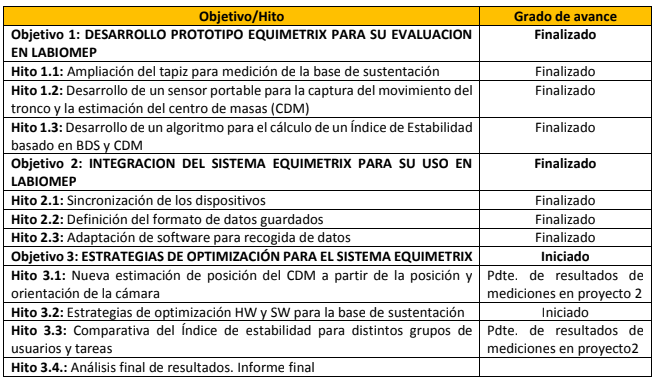
The results and milestones completed as of the date of this report are presented in more detail below, focusing on Project Objectives 1 and 2.
2.1 Objective 1: DEVELOPMENT OF EQUIMETRIX PROTOTYPE FOR EVALUATION IN LABIOMEP
People can use different postural control strategies. There are at least 3 strategies: ankle strategies, hip strategy, or step strategy.
- In the use of ankle strategy, the upper and lower body move in the same direction or in phase with each other. Because the amount of force that can be generated by the muscles surrounding the ankle joint is relatively small, this strategy is generally used to control roll when standing or when the range of motion of the roll is very small. This ankle strategy is also used at the subconscious level to restore balance after a small push.
- Unlike the ankle strategy, the hip strategy involves the activation of the larger muscles of the hip. This strategy is used when the center of mass must move backward more quickly on the support base.
- The final postural control strategy is the step response. This strategy is given when the center of mass is shown beyond a stability limit (e.g., base lift). The body, in this situation, must seek a new sustentation base to prevent a possible fall and take at least one step in the direction of the loss of balance.
The EQUIMETRIX device is to be improved so that it can analyse various postural situations that will trigger ankle, hip or step strategies. It is important to be able to measure the entire recovery process, and particularly in the latter case (step response). Similarly, during anticipated tasks that test balance maintenance, the user may have to take some step to reach a certain center of mass location. Therefore, a sensorized tapestry large enough to also capture the location of the foot that has moved is needed. In the initial prototype this was not possible.
With the focus of the EQUIMETRIX device (sensor mat plus a portable sensor), evaluating the stability of a patient using this step strategy requires a mat of adequate size with the length of a step (see H1.1).
Milestone 1.1: Expansion of the tapestry for measurement of the lift base from the current size (0.45x0.3 cm2, see Figure 2 on the left) to a larger size consisting of 6 units (see Figure 2dcha.).
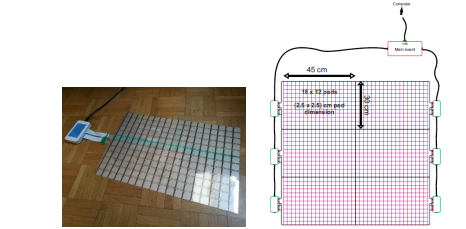
Figure 2 - left A pad (0.45x0.3 m) with 216 sensors. Right: Design of the Flexipad composed of six pads with an overall size of 0.9x0.9 m and 1296 sensors.
In project 1 of the Baben program we have designed and produced the electronic modules that allow to measure the data of each of the 6 pads (Figure 3). One of the electronic modules is the "master", and is responsible for aggregating all the data, formatting them and sending them via USB connection to a main computer.
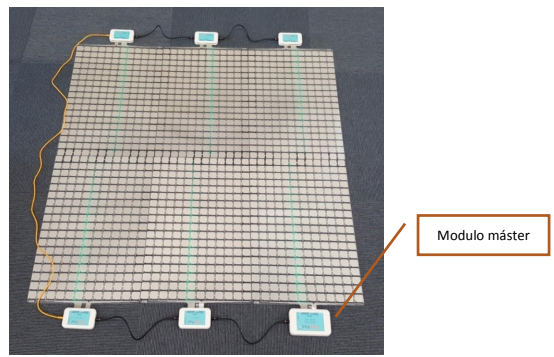
Figure 3 - First version of the Flexipad with 6 pads and 6 electronic modules
To be usable in a real environment, sensors and electronic modules have been protected to (1) prevent damage and (2) facilitate their movement (see Figure 4).
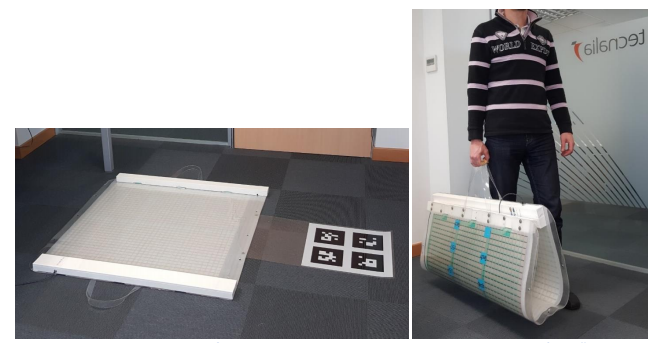
Figure 4 - left First version of the complete Flexipad system. The system is designed for easy handling.
This first version of Flexipad has been improved in several aspects:
- The electronic design has been changed to have only one centralized electronic module (Figure 5Mistake! The origin of the reference is not found.). The six pads are connected via flat cables. In this way, it has been possible to eliminate the protective side parts.
- In addition, after several tests, it has been possible to replace the two 2 mm flexible PVC films that protect the sensitive layer of the pads with two layers of 1 mm flexible PVC film. This resulted in a significant reduction in overall weight.
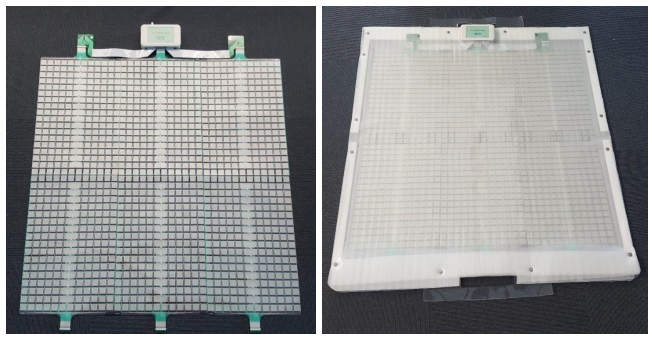
Figure 5 - New electronic Flexipad design with a single centralized module.
In the end we managed to reduce the total weight of the Flexipad from 7.85Kg to 2.60Kg (67% reduction) offering a lightweight and easy to carry solution.
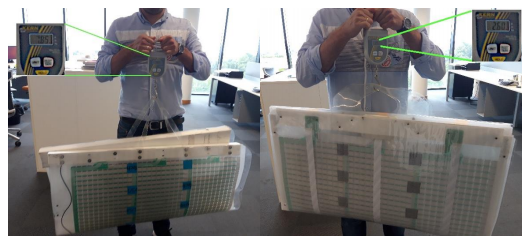
Figure 12 - Pre-prototype EQUIMETRIX sent to LABIOMEP.
3. Preparation and shipment of a complete EQUIMETRIX prototype obtained once Milestone 1.1 has been completed (See Figure 13). This prototype was sent to LABIOMEP in April 2019, once the measurements protocol was defined and includes the adaptation of the software for data recording.
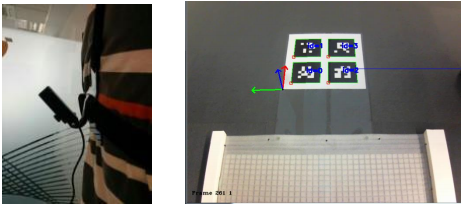
Figure 7 - Optical sensor placed on the trunk (left) to estimate the position and orientation of the trunk from images of the visual pattern (right).
The harness is used to attach and position the camera to the back of a person's trunk. Due to its ease of application and removal, the ability to adjust to various trunk sizes and the possibility of having a degree of freedom to optimally orient the camera, it has been decided to use a commercial product such as the chest harness for the GoPro camera (Figure 8).

Figure 8 - Harness for camera attachment to the trunk
Work in progress: to achieve wireless data transmission between the vision sensor (camera) and the Equimetrix prototype software.
The idea is to replace the USB camera with a mobile phone (Figure 9). The smartphone is in charge of (1) taking images of the visual pattern, (2) estimating the position and orientation of the phone, and (3) sending UDP (via wifi) the 3D position and orientation of the phone.
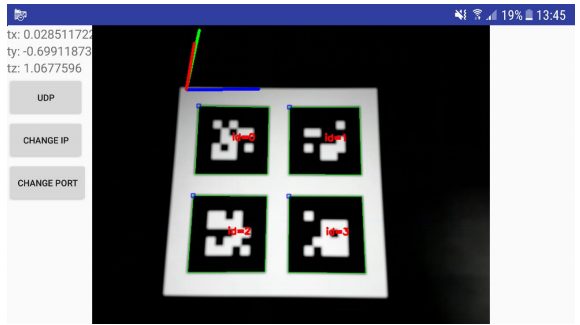
We have created an Android mobile application (Figure 10) that takes care of :
- create a UDP client,
- estimate the position of the camera from the video flow of the visual pattern,
- send a UDP message to the server (computer)
Milestone 1.3: Development of an algorithm for the calculation of a Stability Index based on BDS and CDM. It is assumed that postural stability is associated with some of the following characteristics:
1) maintenance of the CDM (or extended CDM) over the BDS (Hof, Gazendam, and Sinke 2005), 2) or the smooth motion and trajectory of the CDM and the CDP,
3) or the ability to restore the position of the CDM or PDC to an optimal position.
Other studies support the thesis that concepts/methods such as "time to contact" that analyze the relative position between the CDM and the position of the feet (such as BDS) provide more information and are highly reliable compared to traditional methods based on CDM or PDC measurements alone. We can cite in this sense the comparisons of:
- Forth (Forth, Metter, and Paloski 2007) made a comparison between:
o EQscore (based on the CDM position) as the most used parameter as an estimator of the
o With Time-to-Contact (TTC) which is based on the position of the CDM and the speed relative to the BDS. From this comparison they concluded that TTC allows a better differentiation between movements that may pose a risk to postural stability.
- (Wheat, Haddad, and Scaife 2012) : TTC measurements were generally more reliable than traditional postural stability measurements, especially when fewer tests were analyzed and with shorter duration.
Based on these studies, the quantitative functional assessment tool will detect and quantify episodes of instability based on the relative kinematics of the CDM-BDS.
The EQUIMETRIX system uses the concept of "time to contact" (CDM-BDS) to quantify in real time the postural state of a subject.
2.2 Objective 2: INTEGRATION OF THE EQUIMETRIX SYSTEM FOR USE IN LABIOMEP
The three milestones proposed for this objective: Milestone 2.1: Synchronization of devices, Milestone 2.2: Definition of the format of saved data and Milestone 2.3: Adaptation of software for data collection; they have been developed in several phases. They are described in more detail below:
Preparation and sending of an unfinished EQUIMETRIX pre-prototype with access to a basic data acquisition software. This pre-prototype has allowed LABIOMEP to know the system and to be able to define in detail the data collection protocol. The pre-prototype sent is shown in Figure 11 and was sent at the end of January 2019.
Figure 11 - Pre-prototype EQUIMETRIX sent to LABIOMEP.
After sending the pre-prototype and remotely, a training session was held for LABIOMEP researchers on the installation and use of the system, and on the fundamentals and calculation methods on which the EQUIMETRIX solution is based.
2. Support and help to define the protocol of measurements and tests to be performed. TECNALIA has collaborated and contributed to a joint definition of the measurement and comparison protocol to be carried out in project 2. The details of this protocol are included in the progress report 2 corresponding to project 2:
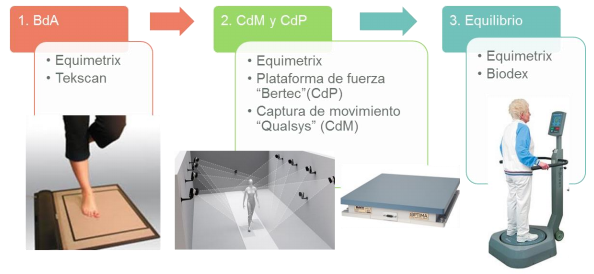
Figure 12 - Pre-prototype EQUIMETRIX sent to LABIOMEP.
3. Preparation and shipment of a complete EQUIMETRIX prototype obtained once Milestone 1.1 has been completed (See Figure 13). This prototype was sent to LABIOMEP in April 2019, once the measurements protocol was defined and includes the adaptation of the software for data recording.
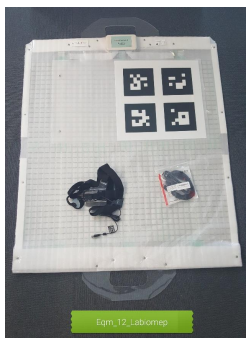
Figure 13 - Complete EQUIMETRIX prototype sent to LABIOMEP.
In addition, and during the measurements carried out by LABIOMEP to date, TECNALIA has given support in resolving the doubts and problems that have arisen in the use of the prototype sent.